Adaptive Data Security for Autonomous Driving Vehicles
David Yu
Hillstone Networks Inc. Santa Clara California U.S.A.
Keywords: Autonomous Driving, ADAS, AD, Adaptive Data Security, Intelligent Connected Vehicle.
Abstract: With the rapid technological advancement of automotive EE architecture, modern autonomous driving
(ADAS/AD) vehicles have become high performance computer system on the wheels. There is huge amount
of data constantly being generated on an autonomous vehicle. These data can originate from different sources,
including vehicle platform, ECUs, sensors, cockpit, connected vehicle networks (V2X). These data are
significant heterogenous in nature and can have quite different processing and security requirements. A large
amount of the data can be sensitive under certain circumstances, attackers can conduct malicious attacks from
vehicle sensor jamming to user data breaches which can compromise driving safety and even cause national
security risks. It is vital to ensure data security and control on autonomous vehicles and vehicle networks and
protect data from cyberattacks.
This paper presents an adaptive data security solution for autonomous driving vehicles, focusing on
ADAS/AD domain. The solution aims to provide the end-to-end data security solution during its entire
lifecycle. It is based on Service Oriented Architecture (SOA) design methodology and expand legacy cyber
security techniques on the autonomous vehicles. It also aims to provide flexibility for future upgrade on its
data classifications and data security policies.
1 INTRODUCTION
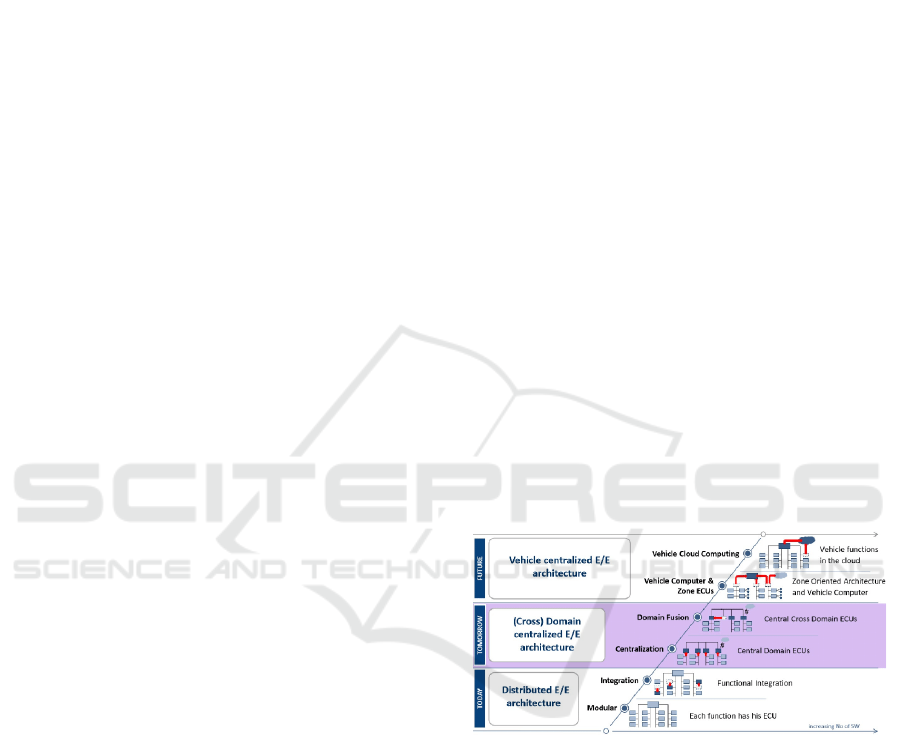
Automotive E/E architecture (Andreas, 2021) has
evolved from its original form that has large number
of distributed, dedicated ECUs, each performing a
specific task to today’s fewer numbers, more
centralized high-performance functional domain
control units where much more complicated
functionalities can be developed on these domain
control units. Looking into the future, through V2X
and vehicle cloud collaborations, more functions can
be done on vehicles as well as in the cloud. This
collaboration helps to further improve autonomous
driving safety as well as user experiences.
The centralized Domain Control Unit (DCU) on
modern autonomous vehicle is essentially a high-
performance computer (HPC) system with powerful
parallel computing capabilities using multiple CPUs
and GPUs. Driven by modern Software Defined
Figure 1: Example of E/E Architecture Evolution. Source:
Bosch.
Vehicle (SDV), more complex deep learning and
other AI algorithms for autonomous driving
applications and services are developed on this
computing system using modern software
engineering design to support L3+ level automation.
This makes the modern autonomous vehicle
essentially “A High-Performance Computer on the
Wheel”.
Modern autonomous driving vehicle is built upon
heterogeneous hardware platform, including multiple
sensors, vehicle control units, AI hardware engines
and other platform hardware. ADAS/AD functional
software pipeline typically consists of perception,
658
Yu, D.
Adaptive Data Security for Autonomous Driving Vehicles.
DOI: 10.5220/0012010900003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 658-663
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

fusion, localization, planning and control, utilizing
deep learning and other AI based algorithms. The
software architecture typically based on Service
Oriented Architecture (SOA) (Rumez, 2020) to
provide layered, modular, scalable support for higher
level ADAS/AD functions and applications
development. This is also critical to develop large
scale software engineering project, especially to
support L3+ level automations.
The other significant characteristics of modern
autonomous vehicles is that huge amount of data is
constantly generated and collected from the vehicles,
usually in the level of terabytes per hour. These data
are generated from multiple sources, such as from
vehicle powertrains, from ADAS/AD sensors, from
deep learning algorithms, from applications as well as
from the cockpit where driver related data are
generated. These data are highly heterogeneous in
nature, they can be structured or un-structured, they
also have different processing and performance
requirements. For example, the data collected by
cameras, radar, lidar and other sensors are upload to
cloud platforms where they are used for continuous
deep learning model training and optimization;
vehicle runtime data collected are used by OEMs in
their vehicle network operational centers.
2 SECURITY RISKS ON
AUTONUMOS DRIVING
VEHICLE
The complexity of modern autonomous driving
vehicles has increased dramatically in both hardware
and software architectures, the amount of
heterogeneous data generated, complexity of ADAS
algorithms and applications, the data processing
pipeline, V2X networking and vehicle cloud
collaborations etc. The amount of software codes also
increased dramatically, this complexity in software
can introduce more vulnerabilities and security risks.
In recent years, hacking and malicious attacks
toward autonomous vehicles and vehicle networks
rose dramatically. In one report by Automotive
Management Online, attacks on connected cars rose
by a staggering 99% (lhpes, 2022). In another report
by China Software Testing Centre, 60% of the
vehicles have various security risks, from physical
interfaces to web browsers that could allow hackers
or malicious attacks to infiltrate and install malwares
or viruses to steal sensitive data. Today information
security on autonomous vehicles including network
security, data security has become the must-have
requirements for auto manufacturers and their
suppliers imposed by government and industry
regulations (Data Security Law, 2021) (Data Security
WP, 2020) (am-online, 2020). There are several
major industry standards and regulations focusing on
automotive functional and information security. For
example, ISO/SAE 21434, a drafted standard on
engineering requirements for cybersecurity risk
management. On the other hand, common automotive
operating system software or middleware like ROS2,
AUTOSAR have also added stronger security
implementations in their newer releases
(AUTOSAR,2020) (ROS2, 2019).
In summary, the complexity of hardware and
software of modern autonomous vehicles introduce
more security vulnerabilities, exposing more
attacking points and larger attacking surface.
Information and data security are critical for
autonomous vehicles and vehicle networks to be
widely adopted.
2.1 Data Security Risks
On average, a self-driving car can generate 100GB of
data per second, with L4-L5 of autonomous level and
with more cars are connected, that amount will go
even higher. These data are generated and collected
from within different vehicle domains including
vehicle platform control, ADAS/AD, and cockpit
domains. These data are valuable assets for
automakers, service providers, and consumers.
Here we focus on the data generated and collected
from ADAS/AD domain. For higher level of
automation support, multiple cameras, radars, lidar,
IMU, GNSS, HDMap and other sensors collect large
amount of raw data constantly. These raw data are
stored in the memory and feed into deep learning
algorithms for object detection, traffic sign detection,
lane detection and other AI based perception
algorithms. During perception, fusion, localization
and planning stages, intermediate results are
produced and used as inputs for computations of next
stage in the pipeline.
Hackers or attackers can infiltrate into these data
processing stages and conduct malicious activities.
This not only can potentially cause driving safety
issues, but it can also impose state security issues as
the external environmental data, geographic location
data, landmark data as well as vehicle runtime data
are constantly collected, processed, and uploaded to
the cloud platform in real time, the data collected and
uploaded could include sensitive information under
certain circumstances. To be able to control and
Adaptive Data Security for Autonomous Driving Vehicles
659

protect ADAS/AD and other vehicle runtime data is
critical on autonomous vehicles.
3 ADAPTIVE DATA SECURITY
ON AUTONOMOUS VEHICLE
Data security on the autonomous vehicle has become
a must have requirements for automobile
manufacturers. While many enterprises level or
cloud-based data security techniques and solutions
are available, given the specific operational
environment and limits in computing power and
storage resources, data security solutions on an
autonomous vehicle have their unique requirements.
3.1 Requirements
A data security solution on an autonomous vehicle
should meet these requirements.
3.1.1 End-to-End Security
From the time data is generated and collected, for
example, the raw data from the camera, lidar, radar
and other sensors, or the intermittent results from the
AI driven perception or fusion algorithms, throughout
their lifecycle, these data are subjected to hacker
attacks or other malicious infiltrations, data security
should be able to track, control and secure every stage
from the beginning to the end of data lifecycle
including data collection, storage, consumption,
uploading, transport etc. centering around the each
stage in ADAS/AD data processing pipeline,
applying different security mechanisms during each
different phase.
3.1.2 Automotive Grade
Any data security solution on the autonomous
vehicles needs to meet the automotive grade level of
system and functional safety requirements. The data
plane of the data security services is part of the overall
ADAS/AD data processing pipeline, it also needs to
meet the real time performance and reliability
requirements. The data security service design and
implementation usually need to be implemented
inside the functional or middleware of ADAS/AD
operating system software, but at the same time, it
need to be decoupled from the main data processing
pipeline to minimize any performance impacts as well
as to provide flexible upgrade path. The data security
modules also need to meet both the software
engineering process and product functions that
required by corresponding standards such as ISO
26262, ASPICE and ISO 21434 etc.
3.1.3 Lightweight
Even with today’s high performance domain
controller, usually hundreds of TOPS to support L3+
level of autonomous driving applications, computing
resources are still relatively scarce on the vehicle.
On the other hand, auto OEMs are often very cost
sensitive in their mass production products, any
additional add-on services that potentially have cost
impact will face adoption challenges. Therefore,
data security solution needs to be light-weighted,
easy to deploy, minimizing the performance and cost
impacts.
3.1.4 Flexible and Upgradable
Information security and data security for
autonomous driving and intelligent connected
vehicles are very active areas in the industry. A lot of
government lead, industry driven standards,
guidelines and regulations are in the making. They are
constantly evolving, enhancing towards completions.
Today’s data security solutions on autonomous
vehicles also need to be able to provide flexible
design to migrate in sync with the latest development
of related standards and regulations through OTA
upgrade.
3.2 Adaptive Data Security on
Autonomous Vehicles
This section discusses the overall design principles of
the adaptive data security solution on the autonomous
vehicle.
3.2.1 Adaptive Data Security Based on
Service Oriented Architecture (SOA)
The overall design of data security solution on
autonomous vehicles uses Service Oriented
Architecture (SOA) principles. It mainly focuses on
data security and control within ADAS/AD domain.
It consists of two main parts: the management plane
and the security service data plane. Security
protection for each phase of data lifecycle is designed
as software service module. These software service
modules are installed on the main ADAS data flow
pipeline as pluggable services and integrated with
data processing pipeline using data interfaces APIs.
ISAIC 2022 - International Symposium on Automation, Information and Computing
660

The management plane includes configuration
and security policy modules. Initial configuration and
security policies are loaded into the operating system
software from manufactures. They can be upgraded
via OTA later, through well-defined data interface
and APIs, providing flexible configuration or security
policy upgrades to each service module.
The data plane consists of several major service
modules running in real time, including Data
Collection, Data Classification, Data Storage, Data
Upload etc. Each of these service modules interacts
with the management plane at north-bound interface,
it also has south-bound interfaces to interact with the
run time data processing pipeline.
The overall components are shown in the
following figure 2.
Figure 2: Adaptive Data Security Components
The adaptive nature of this data security solution
for ADAS/AD domain refers to the following
functions and capabilities:
Adaptive SOA based Framework: Management
plane and data plane are separated. Each real
time data plane service module is essentially a
light-weighted software module and can be
installed into overall data processing pipeline.
The north-south bound data interfaces are well
defined APIs. These services can be executed in
both mirroring mode and inline mode depending
on requirements. The management plan modules
can be updated using OTA. This makes overall
framework elastic and dynamic.
Adaptive data classification: Data can be tagged
or labelled according to the classification rules
defined in configuration policy. These rules can
be statically configured and loaded during
system initialization time. They can also be
updated at later time through configuration
policy module using OTA. This way the security
control of data can be adaptive to different use
cases and runtime environments.
Adaptive data security control: Security control
over the classified data can also be adaptive to
the real runtime operational environment and
circumstances. For example, security policies
can be enforced based on geographic locations,
coordinate positions, based on different data
labels, perceptive environment, object detection
results etc. Security actions can include those
such as data masking, data upload disabling, data
encryption for storage and transmission etc.
These security criteria and actions, defined in
security policies, can also be updated using OTA,
providing effective control during runtime.
3.2.2 Data Collection
Autonomous vehicles collect data from driving
environment through multiple sensors like camera,
radar, lidar etc., simultaneous vehicle data are
collected from IMU, location data are collected from
GNSS or HDMap. Raw data are stored in the on-
board memory and are feed into deep learning
perception and other AI algorithms for fusion,
localization, and planning. Intermediate data are the
outputs of deep learning and other AI algorithms and
are used as the inputs for the next stage in data
processing pipeline. As raw or intermediate data are
collected, data tags or labels, together with other
context information are built as meta descriptors
according to the configuration policies and set in meta
data descriptor buffers to represent the priority,
security, and other control characteristics for different
classes of data.
3.2.3 Data Storage
Raw data, intermediate results data from algorithms
and computing are stored in different on-board
memory areas. Metadata descriptors are associated
together with these classified data buffers throughout
their lifecycles. Different classes of data in different
storage have different security and control
mechanisms according to the configuration policies,
including access control, secure storage etc.
3.2.4 Data Classification
Data generated on the autonomous vehicles are
heterogenous in nature. They can be structured or un-
structured, each has its own different processing or
performance requirement. To classify the data
properly is vital for proper data security control
throughout their lifecycles.
There can be different ways to classify data. It is
important to adhere and follow data classification
methodology and guidelines defined by the industry
standards or government regulations.
Data classifications can have different levels, data
security and control policies can apply to each of
Adaptive Data Security for Autonomous Driving Vehicles
661

these levels, providing better security and control
granularities.
The following is an example of data classification
with three levels.
Table 1: Data classification with three levels
Level l Level 2 Level 3
vehicle ID
Vehicle Data vehicle license, model, OEM
ECU
camera road, human, env
lida
r
coordinates
rada
r
env measure
IMU
Perce
p
tion Data HDMa
p
coordinates
GNSS
coordinates, trajectory
V2X
ob
j
ect ob
j
ect classification
system steering angle, speed,
acc..
Decision Data driver operation
vehicle state
vehicle
p
erf speed, acc, angel
Runtime Data module runtime
GNSS, IMU, ADAS,
OBU, cameras
runtime logs
Associated with each classified data category is a
set of security and control attributes or requirements,
covering each stage during the data lifecycle such as
data collection, storage, usage, and transmission. The
definitions of these requirements are usually drawn
from industry standards or government regulations.
For example, for collection, whether needs legal
qualification or authorization; for storage, whether
needs encryption, minimal storage timeout; for usage,
whether needs access control or privileges; for
transmission, whether needs to use private line,
whether needs encryptions etc.
The following is an example of data control
for each data service module.
Table 2: Data control example for each data services.
Collection Storage Usage Transport
Legal
Authorization
Storage
Timeout
Access
Privile
g
e
Encryption
Methods
User Consent Encryption
Methods
Auditing Private
Networ
k
User
Notification
Access
Control
Monitoring Public
Networ
k
3.2.5 Data Security Policy
Security policies in traditional firewall, IPS, IDS
products usually consist of three types of elements:
scope definition, condition matching and actions.
For example, a typical firewall policy usually has
schema like:
FROM entity-1 TO entity-2 IF criteria-matching
THEN action
Next generation firewall further enriches the
security policies to incorporate more powerful and
flexible elements such as applications, users or user
groups, behaviours, and other contexts in each of
these building blocks.
In data security solution design, traditional
network or application security policies will be
further expanded in these categories to incorporate
those elements that are unique in autonomous driving
circumstances.
Scope: Besides legacy security scope entities like
security zone, user, or applications etc., data that
labelled with proper classifications can also be
included in the scope according to data source
types such as camera, radar, GPS, IMU etc.
Scope can further include each level defined in
data classifications or combinations of them.
Criteria: Criteria matching can be expanded to
include geographic location or coordinate
position-based criteria or other normalized
schema that can be used to describe the location,
coordinate positions or areas that the vehicle is
currently located in. It can also use results
classifications from ADAS/AD algorithms such
as object type, traffic sign, landmarks and other
normalized entities defined in the autonomous
driving environmental model.
Action: Besides action in traditional network
security policies such as DENY, PASS, LOG
etc., data security actions can also include
NO_COLLECT, NO_UPLOAD, DO_MASK,
DO_ENCRYPT and others. These actions can be
done for each level in data classification to
provide better granularities of security control.
A simplified data security rule example can have
following contents:
IF
data_source == CAMERA_DATA &&
data_class_prio == HIGH_PRIO &&
data_class_sec == HIGH_SEC &&
object_type == RESTRICTED_ZONE
THEN
# Stop upload if in restricted zone
data_upload = NO_UPLOAD
END
IF
data_source == CAMERA_DATA &&
data_class_prio == HIGH_PRIO &&
data_class_sec == HIGH_SEC &&
object_type == RESTRICTED_ZONE
THEN
ISAIC 2022 - International Symposium on Automation, Information and Computing
662

# Stop data upload in restricted
# Zone and mask LV license plate
data_upload = NO_UPLOAD
data_sec_proc = DO_MASK
END
Data security policies need to be standardized.
The rule schemas need to be defined in a normalized
way. Security policies can be described using XML
or YAML files in which more complex security rules
and logical relationships can be defined.
In traditional network, security policies are
installed on device or in the cloud and apply to each
packet received on the wire. In case of autonomous
vehicle computing environment, various computing
tasks are usually running in a timer based executing
loop controlled by OS kernel task scheduler, usually
every 10ms in SOC. Data security services are also
executed in a timer-based loop as separate tasks.
4 CONCLUSIONS
In this paper, we presented an adaptive data security
framework on the autonomous driving vehicles. It
aims to provide end to end data security controls
throughout the lifecycle of the heterogeneous data on
the autonomous vehicles. From the time they are
generated, collected, stored, transmitted, and
uploaded, adaptive to the different scenarios on how
data are classified, prioritized, protected, and
transmitted. It also aims to provide agility and
flexibility in term of future upgrade through OTA so
the existing design and implementation can be
leveraged. It should be noted that there are future
work needs to be done including the completion of
each level of data classification, standardization and
normalization security policy and control rules.
REFERENCES
Andreas Lock, “Trends of Future E/E-Architectures”,
Accessed: Oct. 18, 2021. https://www.gsaglobal.org/
wp-content/uploads/2019/05/Trends-of-Future-EE-
Architectures.pdf
Rumez, Marcel & Grimm, Daniel & Kriesten, Reiner & Sax,
Eric, “An Overview of Automotive Service-Oriented
Architectures and Implications for Security
Countermeasures”. IEEE Access. 8. 10.1109/ACCESS,
2020.
Data Security Law of the People's Republic of China
http://www.npc.gov.cn/npc/c30834/202106/7c9af12f51
334a73b56d7938f99a788a.shtml
Requirements on Security Management for Adaptive
Platform https://www.autosar.org/fileadmin/
user_upload/standards/adaptive/201/AUTOSAR_RS_S
ecurityManagement.pdf
ROS2 DDS-Security Integration https://design.ros2.org/
articles/ros2_dds_security.html
https://www.lhpes.com/blog/why-is-cybersecurity-
important-for-autonomous-vehicles
Data Security for Autonomous Driving – Whitepaper
http://www.impcia.net/Uploads/report/2020-04-
28/5ea7dba33e4e7.pdf
https://www.amonline.com/news/manufacturer/2020/06/04
/cyberattacks-on-connected-cars-rise-by-99
Connected Vehicles – Whitepaper
https://www.amonline.com/news/manufacturer/2020/0
6/04/cyberattacks-on-connected-cars-rise-by-99
Adaptive Data Security for Autonomous Driving Vehicles
663
